
Introduction
Precision closed-loop electro-hydraulic control systems are a control technology that converts electrical control signals into mechanical displacement or speed, widely used in fields such as industrial automation, aerospace, and medical equipment. This paper mainly discusses the design of precision closed-loop electro-hydraulic control systems driven by servo valves, aiming to improve system stability and control accuracy to achieve high-precision control of actuators.
Design of precision closed-loop electro-hydraulic control systems driven by servo valves
System composition: Precision closed-loop electro-hydraulic control systems are mainly composed of controllers, servo valves, hydraulic cylinders, sensors, actuators, and feedback loops. Among them, the controller is the 'brain' of the system, responsible for receiving and processing signals from sensors and outputting control signals to drive the servo valve; the servo valve is a key component for controlling the flow of hydraulic oil, which controls the movement of the hydraulic cylinder by controlling the size of the oil pressure; the hydraulic cylinder is the actuator, which controls external loads through the movement of the piston; sensors are used to detect system status and feedback to the controller; the actuator adjusts its working state according to the feedback signal to achieve closed-loop control of the system; the feedback loop is used to ensure that the system operates stably within the set range.
Control algorithms: To achieve precise control, it is necessary to design appropriate control algorithms. Common control algorithms include PID control, fuzzy control, and adaptive control. PID control is the most commonly used control algorithm, which achieves precise control of the system output by adjusting the three parameters of proportion (P), integration (I), and differentiation (D). PID control can well cope with dynamic changes in the system, but its control accuracy and response speed are affected by parameter selection. Fuzzy control is a control algorithm based on fuzzy logic, which controls the system output through fuzzy rules and has strong robustness and adaptability. Adaptive control adjusts control parameters according to system changes to achieve optimal control of the system output.
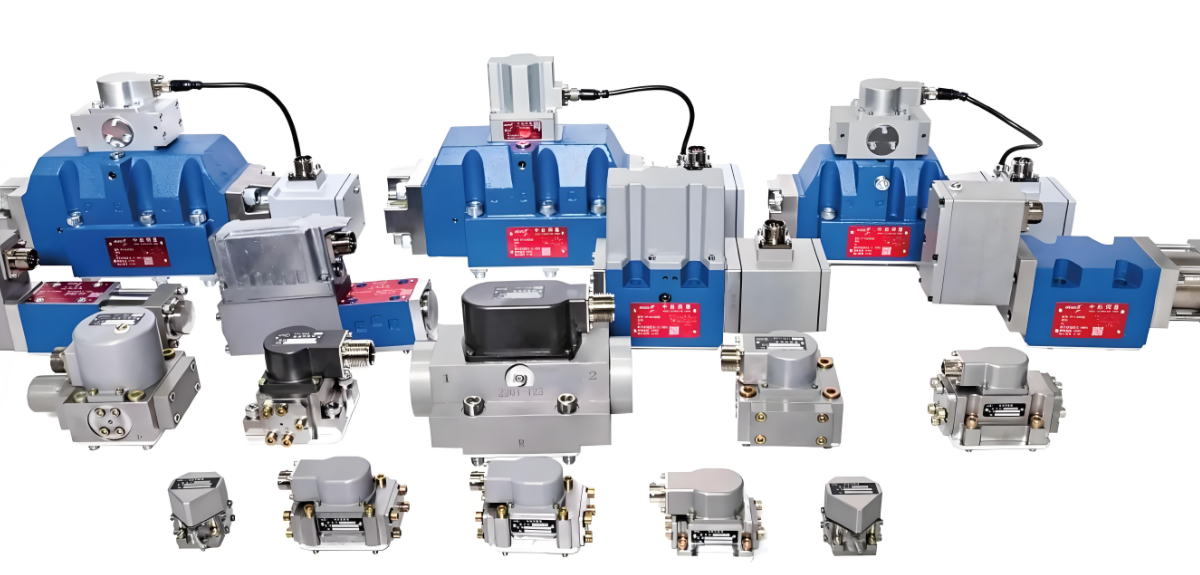
Design of servo valves: The servo valve is a key component in precision closed-loop electro-hydraulic control systems, and its performance directly affects the control accuracy and response speed of the system. To improve the performance of the servo valve, design from the following aspects is required: first, adopt advanced servo valve structural design to improve its response speed and control accuracy; second, adopt high-performance servo valve control algorithms to achieve precise control of the servo valve; finally, adopt advanced servo valve materials and manufacturing processes to improve its durability and reliability.
Conclusion
Precision closed-loop electro-hydraulic control systems driven by servo valves have extensive application prospects in fields such as industrial automation, aerospace, medical equipment, and more. This paper provides a reference for related research by analyzing the design of precision closed-loop electro-hydraulic control systems driven by servo valves in detail. In the future, we can further optimize control algorithms and servo valve design to achieve higher precision and reliability in precision closed-loop electro-hydraulic control systems.